打算用B4J编写一系列OpenCV示例,用于更好地了解常见的图像处理算法和OpenCV的使用,主要包含ImageTrans用到的操作,会持续更新。
OpenCV函数的具体用法见前文:OpenCV使用笔记
-
二值化
二值化是在灰度图像的基础上进行操作,用一定的阈值对每个像素的灰度进行判断,如果该灰度小于阈值则是黑色,大于阈值则是白色。
灰度图像可以由RGB图像转换得来,数值在0-255之间,数值越大,亮度越大。
下面是一个RGB转灰度的公式:
Gray=(R*299 + G*587 + B*114 + 500) / 1000在OpenCV中使用threshold函数进行操作,该函数还支持OTSU和Triangle算法自动计算阈值。
用PS打开灰度图像,像素的灰度会用K值来表示,这是反映黑色程度的百分值,计算方式:1-灰度值/255。
B4J项目:threshold
-
轮廓检测
OpenCV使用1提出的改进版边界跟踪(border following)算法进行轮廓检测。
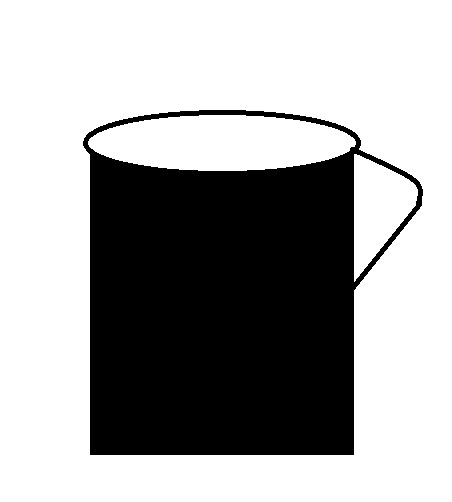
轮廓检测需要在二值化的图像上进行。什么是轮廓,可以看下面的示例。
原图:
轮廓:
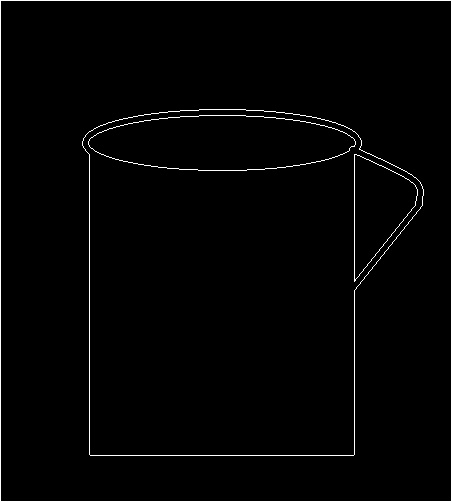
轮廓可以分为两类,一种是外轮廓(outer border),一种是孔洞(hole)。因为OpenCV检测时处理的是白色的像素,所以这里孔洞和外轮廓是倒过来的。
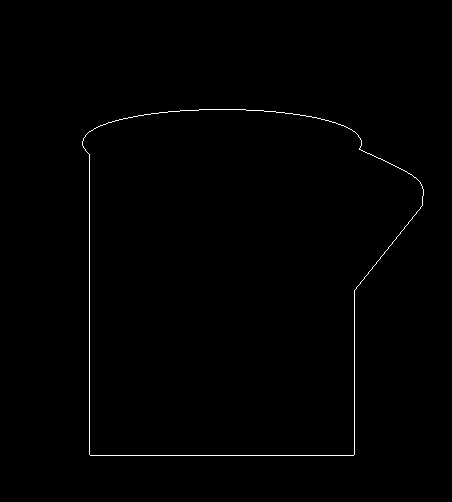
孔洞:
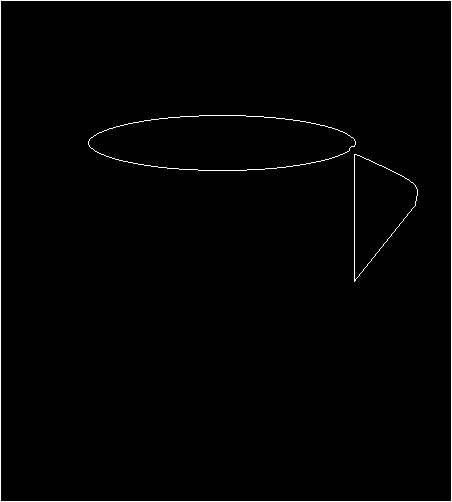
外轮廓:
下面是OpenCV中的用法:
findContours(img As cvMat,contours As List,hierarchy As cvMat,mode As Int,method As Int)mode有四种模式:
- RETR_EXTERNAL,提取所有外轮廓
- RETR_LIST,单纯列举出所有轮廓
- RETR_CCOMP,将轮廓分为外轮廓和孔洞轮廓两种,最内部的轮廓会和最外面轮廓归到一级。
- RETR_TREE,计算完整的轮廓层级
hiearchy,包含四种层级信息,分别是:
- 同一层级的下一轮廓
- 同一层级的前一轮廓
- 第一个子轮廓
- 父轮廓
我觉得比较有用的是父轮廓信息,可以据此对轮廓进行分类。
B4J项目:findContours
示例程序可以单独查看某个层级的轮廓,便于试验。
-
图像修复
图像修复原理是给出需要修复的图片区域,然后根据区域周边像素对该区域进行复原。一个用途是结合轮廓检测生成文字掩膜,抹除图片中的文字。
OpenCV中对应inpaint方法。该方法包含在轮廓检测项目中。
-
形态学操作
这里主要指腐蚀和膨胀操作。
首先取一个核(kernel),也叫形态元素(Structuring Element),进行卷积操作。核的中心点的取值是所在核的所有像素值中最大或最小的那个值,如果取最大则为膨胀操作,最小则为腐蚀操作。
-
边缘检测
边缘和轮廓这两个概念比较接近。我理解轮廓提取的精度更高,边缘则是近似的,表示灰度变化明显的区域。边缘检测能处理彩色图片,可以保留更完整的边缘信息。具体可以看下面的例子,不过边缘检测的结果和阈值的设定有关。
原图:

轮廓:

边缘:

使用Canny算子检测物体的边缘,该操作有以下步骤:
- 高斯平滑用于去除噪点
- 计算梯度强度和方向
- 非极大值抑制去除非边缘像素
- hysteresis阈值处理,输出二值化的轮廓图像,该步骤需要两个阈值,如果像素的梯度高于较大的阈值,则判定为边缘。如果像素的梯度小于较小的阈值则去除。如果在两个阈值之间,那么需要存在相邻的梯度高于较大的阈值的像素。
-
连通区域标记
如果一个像素和它周围的8个像素或者上下左右4个像素的颜色一致或相近,那这些像素就是彼此连通的。
连通区域标记就是给每个区域的像素进行标记(赋值一个数字),从而知道图中有哪几个连通区域,每个区域对应哪些像素。
连通区域和轮廓的区别在于,轮廓仅仅是图像的边缘部分。 连通区域标记的算法很多,比较简单的是递归的方法。具体见相关链接。
连通区域标记和区域生长十分相似,区别在于前者用于检测对象,而后者用于分割图像。
相关链接:
- 【数字图像处理】边界跟踪算法
- Finding contours in your image
- Canny Edge Detector
- Eroding and Dilating
- 图像分析:二值图像连通域标记
- Connected Component Labelling
参考文献:
-
Suzuki, S. and Abe, K., Topological Structural Analysis of Digitized Binary Images by Border Following. CVGIP 30 1, pp 32-46 (1985) ↩